Асинхронные машины обладают свойством обратимости. Однако асинхронные генераторы практически не применяются, так как характеристики хуже, чем у синхронных генераторов.
Широкое применение имеют трехфазные асинхронные двигатели.
Асинхронный двигатель
Асинхронный двигатель состоит из неподвижного статора и вращающегося ротора, разделенных между собой воздушным зазором.
Статор состоит из цилиндрического литого корпуса, сердечника и трехфазной обмотки.
Сердечник собирается из тонких листов электротехнической стали, изолированных друг от друга и запрессовывается в корпусе статора. На внутренней поверхности сердечника вырублены пазы, в которые укладывается трехфазная обмотка статора.
Обмотка подключена к трехфазной сети и представляет собой систему проводников, сдвинутых относительно друг друга в пространстве вдоль окружности статора на 120о. Обмотки статора могут соединяться звездой или треугольником.
Схема соединения обмоток статора зависит от расчетного напряжения двигателей и номинального напряжения двигателей и номинального напряжения сети.
Ротор состоит из стального вала, на который напрессован сердечник, выполненный из отдельных листов электротехнической стали с пазами.
Обмотка ротора бывает двух типов – короткозамкнутая и фазная. Наибольшее распространение имеют двигатели с короткозамкнутым ротором (ротор с беличьей клеткой).
Токопроводящая часть такого ротора состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов (см. рисунок). Обычно «беличья клетка» формируется путем заливки пазов ротора расплавленным алюминием.
Фазный ротор имеет три обмотки, соединенные в звезду. Выводы обмоток присоединены к кольцам, закрепленным на валу и изолированным друг от друга и от вала (см. рис.19)
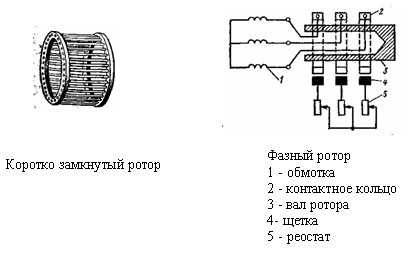
Рис. 19
Для осуществления электрического контакта с обмоткой вращающегося фазного ротора на каждое контактное кольцо накладывают подпружиненные щетки, расположенные в щеткодержателях.
Асинхронные двигатели с фазным ротором имеют более сложную конструкцию и менее надежны, но они обладают лучшими регулировочными и пусковыми свойствами.
Регулирование частоты вращения асинхронных двигателей
Из выражения, по которому можно рассчитать частоту вращения ротора
![]()
следует, что n2 можно регулировать изменением какой либо из трех величин: скольжения (S), частоты тока в обмотке статора или числа пар полюсов (р) в обмотке статора.
Коэффициент мощности асинхронных двигателей
Кроме активной мощности Р1 двигатель потребляет реактивную мощность Q1, в основном необходимую для образования вращающегося магнитного поля. Коэффициент мощности определяется по формуле:
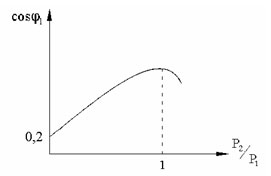
Рис.21. Зависимость коэффициента мощности от загрузки двигателя
При холостом ходе cos φ1 имеет малое значение (не превышает 0,2), так как активная мощность расходуется только на относительно небольшие потери в статоре и небольшие механические потери, а реактивная мощность имеет практически постоянное значение.