Принцип действия синхронного двигателя основан на явлении притяжения разноименных полюсов двух магнитных полей — вращающегося поля статора и постоянного поля ротора. Вращающееся магнитное поле статора создается при питании обмоток статора от трехфазной сети.
Постоянное поле ротора создается постоянным током возбуждения, протекающим по обмотке возбуждения ротора. На рис.24,а полюсы N и S вращающегося магнитного поля статора показаны штриховкой. Они вращаются против часовой стрелки с частотой n0.
При вращении поля статора с частотой n0, полюсы ротора N0 и S0 будут вращаться также с частотой n0 (произойдет «сцепление» этих полюсов с разноименными полюсами статора N и S).
В режиме идеального холостого хода (момент сопротивления отсутствует Мс=0) оси магнитных полей статора и ротора совпадают. При этом на полюсы ротора действуют радиальные силы F1 и F2, которые не создают вращающего момента.
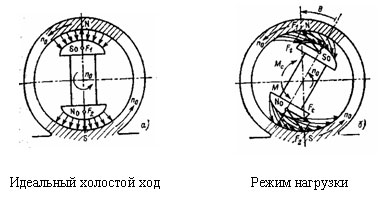
Если к валу машины приложить механическую нагрузку, которая создает момент сопротивления Мс, ось ротора и его полюсов S0, N0 сместится в сторону отставания на угол q, который называется углом нагрузки (см.рис.24 ,б).
В данном случае вращающееся поле статора «ведет» за собой поле ротора и сам ротор. Тангенциальные составляющие Ft сил F создают вращающий момент М двигателя, который преодолевает момент сопротивления (М = Мс).
Полезно знать, что момент двигателя пропорционален напряжению сети (М º Uc); то есть синхронный двигатель, в отличие от синхронного двигателя, в меньшей степени зависит от колебаний питающего напряжения.
При неизменной величине напряжения сети максимальный момент двигателя зависит от тока возбуждения.
При увеличении момента сопротивления Мс угол нагрузки q увеличивается до некоторого предела, когда Мс>Mmax, то угол нагрузки q станет больше 90°, режим двигателя будет неустойчивым. Вращающий момент двигателя начнет уменьшаться, ротор будет тормозиться, двигатель выйдет из синхронизма и может остановиться.
Выпадение машины из синхронизма недопустимое явление. Синхронные машины проектируют так, чтобы при номинальном режиме угол нагрузки не превышал 30°, а запас по моменту и активной мощности был не менее 1,65.
Механическая характеристика синхронного двигателя n=f(M) представлена на рис. 25
Синхронный двигатель позволяет регулировать реактивную мощность Q, потребляемую из сети, и улучшать коэффициент мощности cos j сети. При этом двигатель должен работать в режиме перевозбуждения (Iв>Iвном).
Существуют специальные машины (синхронные компенсаторы), предназначенные для выработки реактивной мощности, которая отдается в сеть и потребляется другими потребителями, например, асинхронными двигателями. Тем самым исключается необходимость передачи реактивной мощности по сети на большие расстояния от электрической станции и сокращаются потери мощности в сети, что повышает эффективность системы электроснабжения.
Синхронные компенсаторы имеют облегченную конструкцию, меньшие размеры и массу, так как работают вхолостую и загружены только реактивным током.